|
Beining Han (韩贝宁) I'm a Ph.D. candidate in Computer Science at Princeton University, advised by Prof. Jia Deng. Previously, I recieved B.Eng. in Yao Class at Tsinghua University in 2022, advised by Prof. Chongjie Zhang. It is my pleasure to intern at NVIDIA SRL, LPR and GEAR. |

|
News
|
ResearchI'm broadly interested in AI for robotics, especially for robot manipulation. |
|
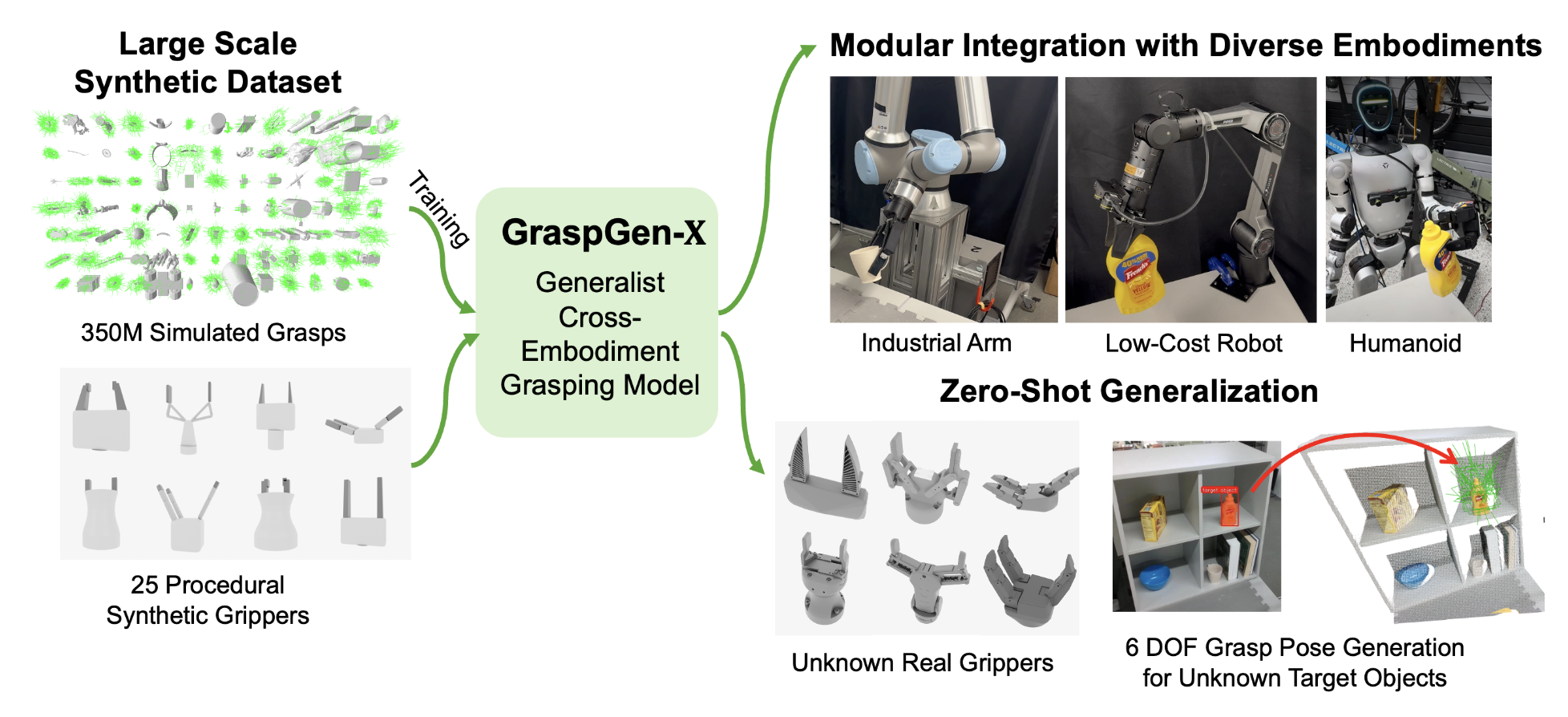
GraspGen-X: Cross-Embodiment 6-DOF Diffusion-based Grasping
Beining Han, Yu-Wei Chao, Erwin Coumans, Clemens Eppner, Jia Deng, Stan Birchfield, Adithyavairavan Murali The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 |
|
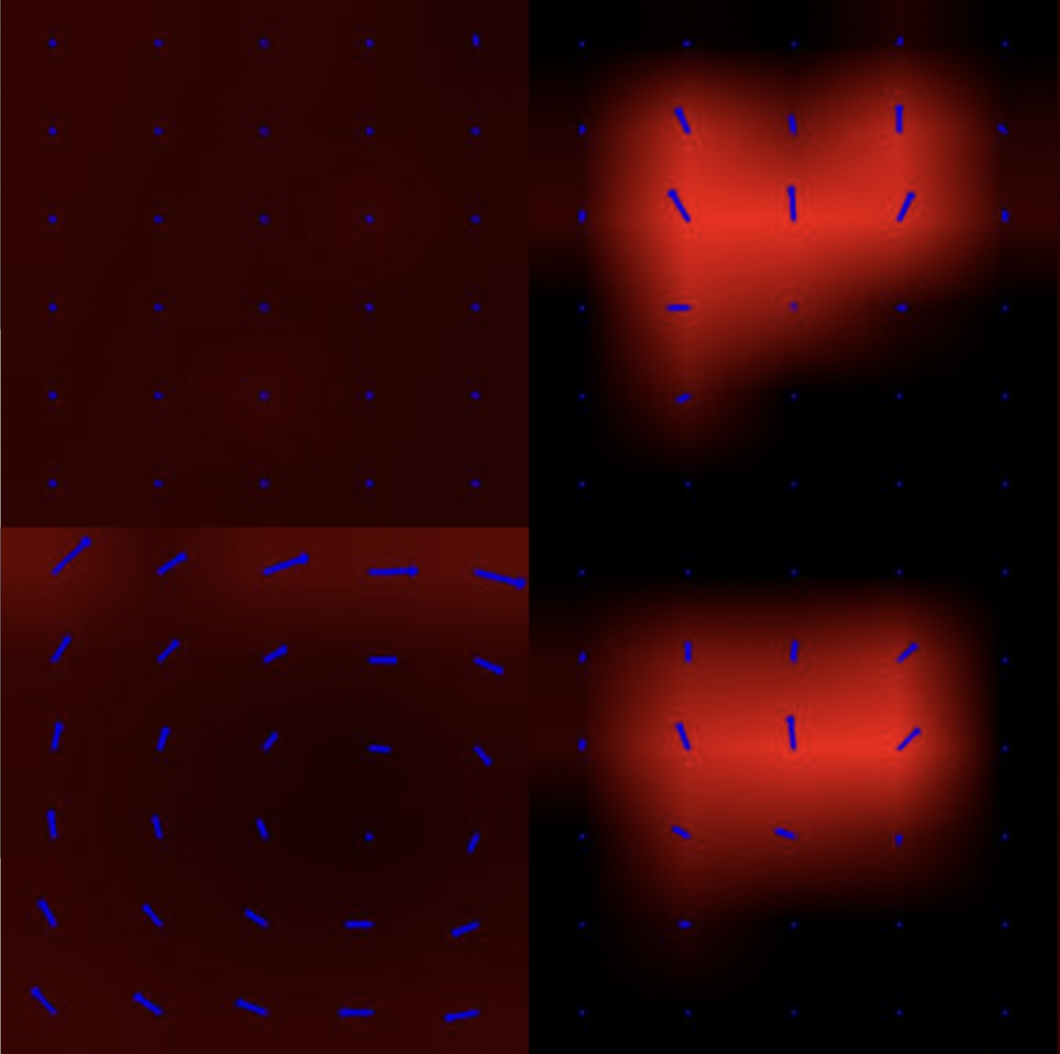
Learning Open-World Visual-Tactile Grasp Stability Prediction with
Synthetic Data
Beining Han, Gan Luyang, Derek Geng, Abhishek Joshi, Jia Deng |
|
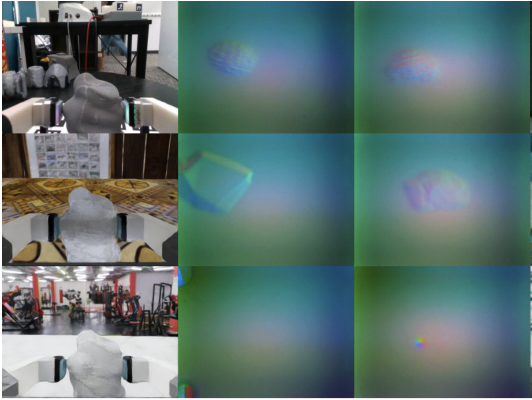
Zero-shot Sim2Real Transfer for Magnet-Based Tactile Sensor on Insertion Tasks
Beining Han, Abhishek Joshi, Jia Deng IEEE International Conference on Robotics and Automation (ICRA), 2026 |
|
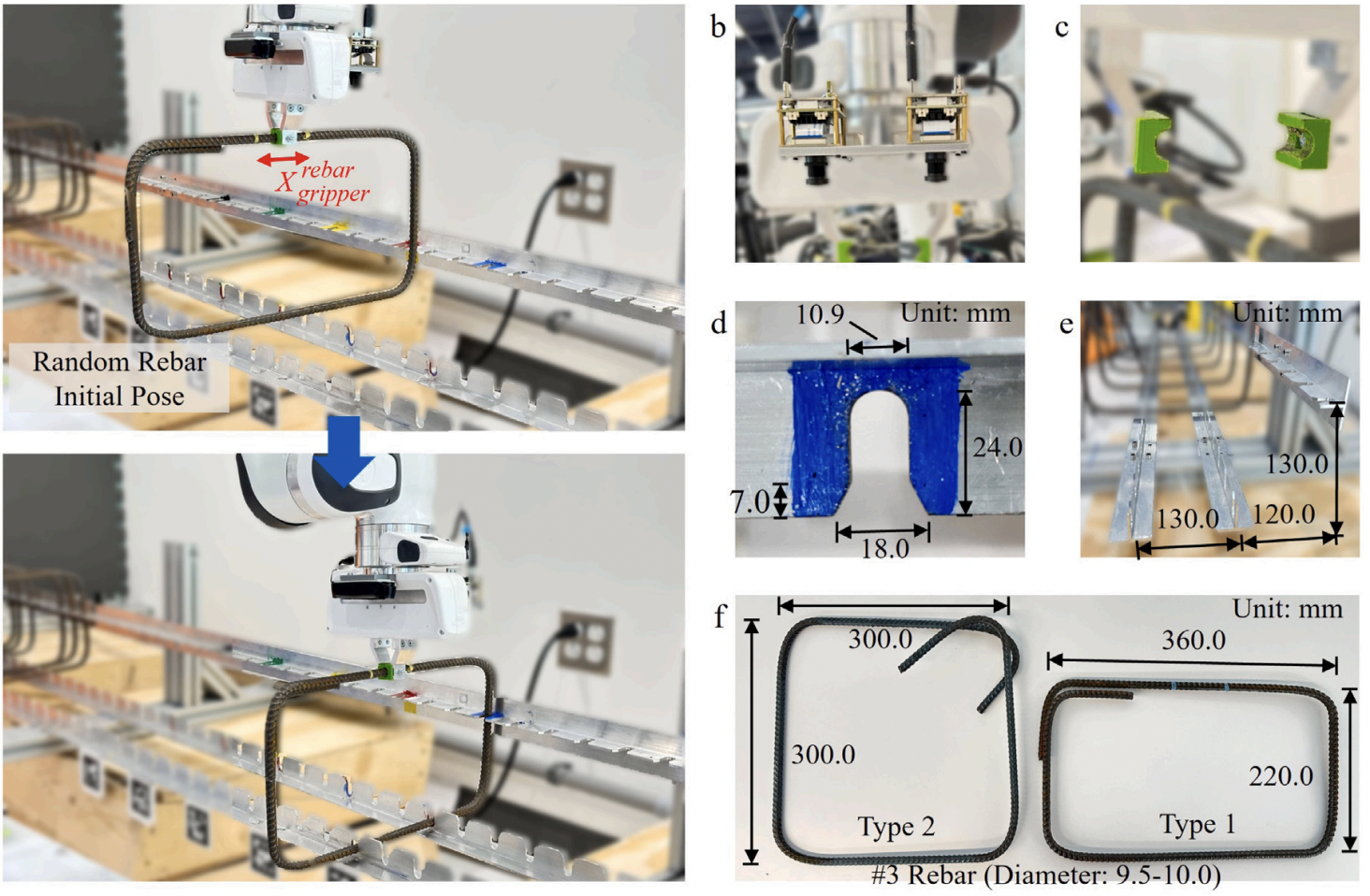
Mobile Robotic Rebar Cage Assembly via Imitation Learning
Tao Sun, Beining Han, Jimmy Wu, Szymon Rusinkiewicz, Yi Shao Automation in Construction, 2026 |
|
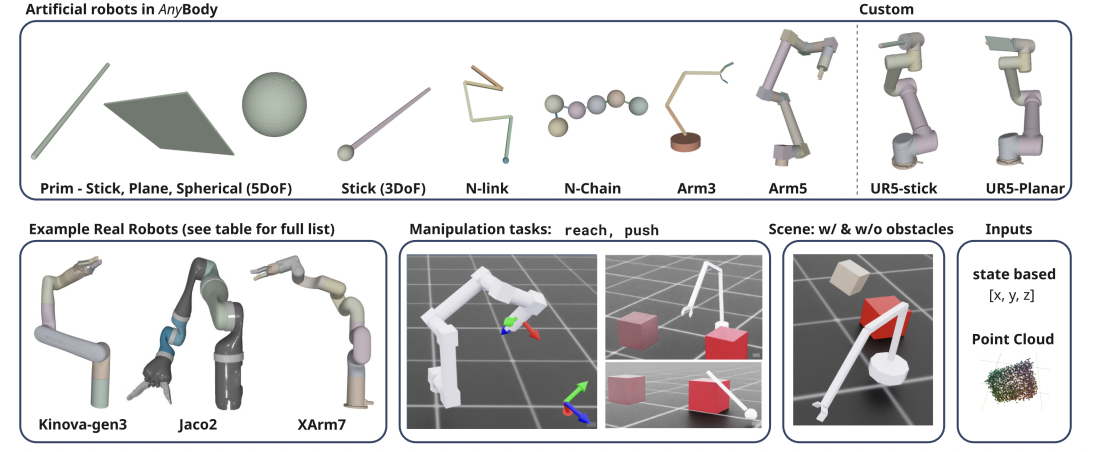
AnyBody: A Benchmark Suite for Cross-Embodiment Manipulation
Meenal Parakh, Alexandre Kirchmeyer, Beining Han, Jia Deng Workshop on Robot Hardware-Aware Intelligence, RSS, 2025 |
|
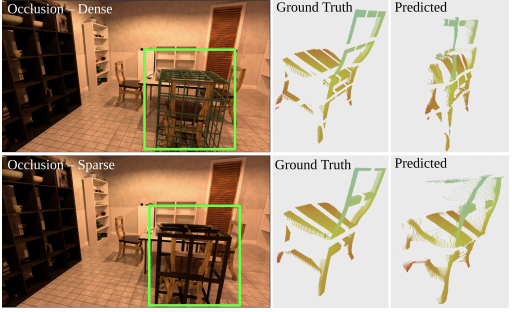
Evaluating Robustness of Monocular Depth Estimation with Procedural Scene Perturbations
Jack Nugent, Siyang Wu, Zeyu Ma, Beining Han, Meenal Parakh, Abhishek Joshi, Lingjie Mei, Alexander Raistrick, Xinyuan Li, Jia Deng Advances in Neural Information Processing Systems (NeurIPS), 2025 |

|
Procedural Generation of Articulated Simulation Assets
Abhishek Joshi, Beining Han, Jack Nugent, Yiming Zuo, Jonathan Liu, Hongyu Wen, Stamatis Alexandropoulos, Tao Sun, Alexander Raistrick, Gaowen Liu, Yi Shao, Jia Deng Workshop on Learning to Simulate Robot Worlds, Conference on Robot Learning (CoRL), 2025 |
|
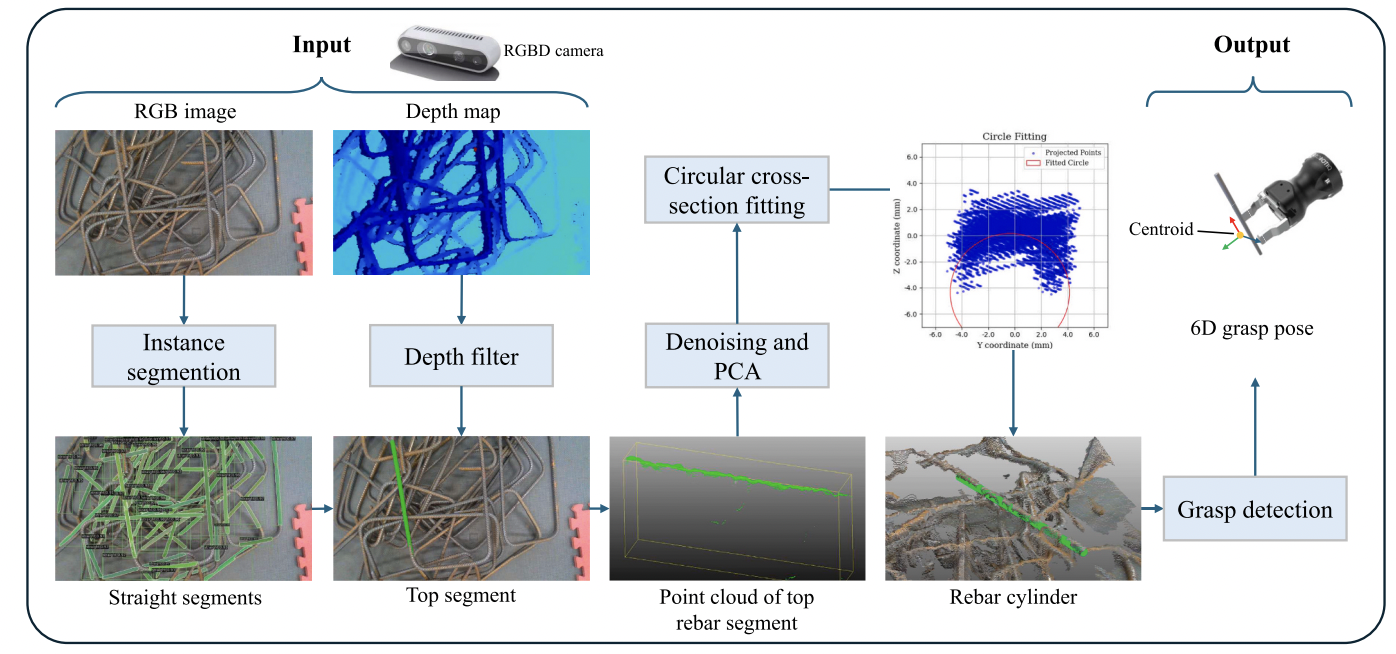
Rebar Grasp Detection Using a Synthetic Model Generator and Domain Randomization
Tao Sun, Beining Han, Szymon Rusinkiewicz, Yi Shao Automation in Construction, 2025 |
|
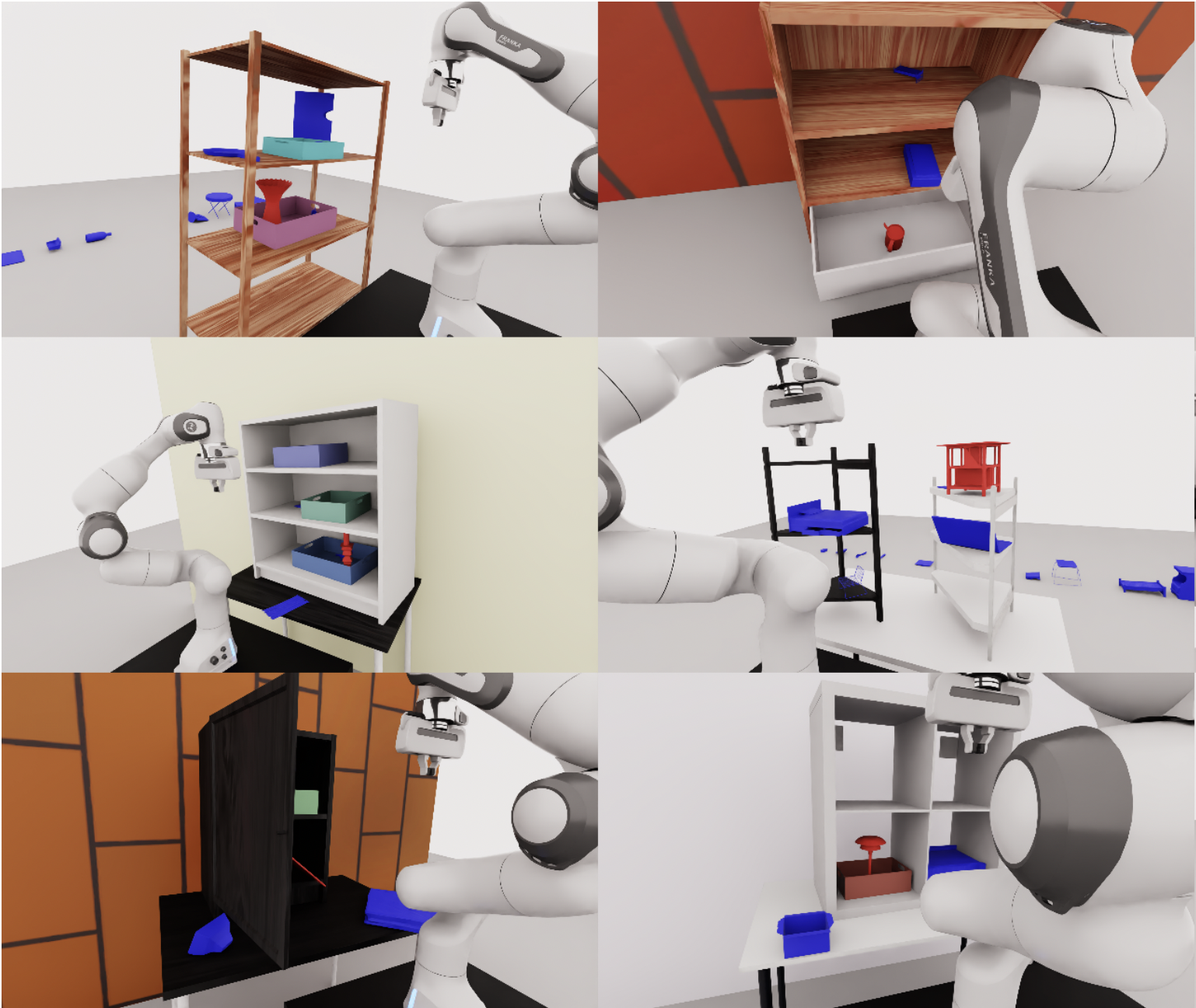
FetchBench: A Simulation Benchmark for Robot Fetching
Beining Han, Meenal Parakh, Derek Geng, Jack A Defay, Gan Luyang, Jia Deng The Conference On Robot Learning (CORL), 2024 |

|
Infinigen Indoors: Photorealistic Indoor Scenes using Procedural Generation
Alexander Raistrick*, Lingjie Mei*, Karhan Kayan*, David Yan, Yiming Zuo, Beining Han, Hongyu Wen, Meenal Parakh, Stamatis Alexandropoulos, Lahav Lipson, Zeyu Ma, Jia Deng The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 |

|
Infinite Photorealistic Worlds using Procedural Generation
Alexander Raistrick*, Lahav Lipson*, Zeyu Ma*, Lingjie Mei, Mingzhe Wang, Yiming Zuo, Karhan Kayan, Hongyu Wen, Beining Han, Yihan Wang, Alejandro Newell, Hei Law, Ankit Goyal, Kaiyu Yang, Jia Deng The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023 |
|
Off-policy Reinforcement Learning with Delayed Rewards
Beining Han, Zhizhou Ren, Zuofan Wu, Yuan Zhou, Jian Peng Proceedings of the 39th International Conference on Machine Learning (ICML), 2022 |
|
|
Towards Understanding Cooperative Multi-agent Q-learning with Value Factorization
Jianhao Wang*, Zhizhou Ren*, Beining Han, Jianing Ye, Chongjie Zhang Advances in Neural Information Processing Systems 34 (NeurIPS) , 2021 |
|
|
Learning Domain Invariant Representations in Goal-conditioned Block MDPs
Beining Han, Chongyi Zheng, Harris Chan, Keiran Paster, Michael Zhang, Jimmy Ba Advances in Neural Information Processing Systems 34 (NeurIPS) , 2021 |
|
|
On the Estimation Bias in Double Q-Learning
Zhizhou Ren, Guangxiang Zhu, Hao Hu, Beining Han, Jianglun Chen, Chongjie Zhang Advances in Neural Information Processing Systems 34 (NeurIPS) , 2021 |
|
|
DOP: Off-Policy Multi-Agent Decomposed Policy Gradients
Yihan Wang*, Beining Han*, Tonghan Wang*, Heng Dong, Chongjie Zhang International Conference on Learning Representations (ICLR), 2021 |
|
Design and source code from Jon Barron. Credit to Claude Code. |